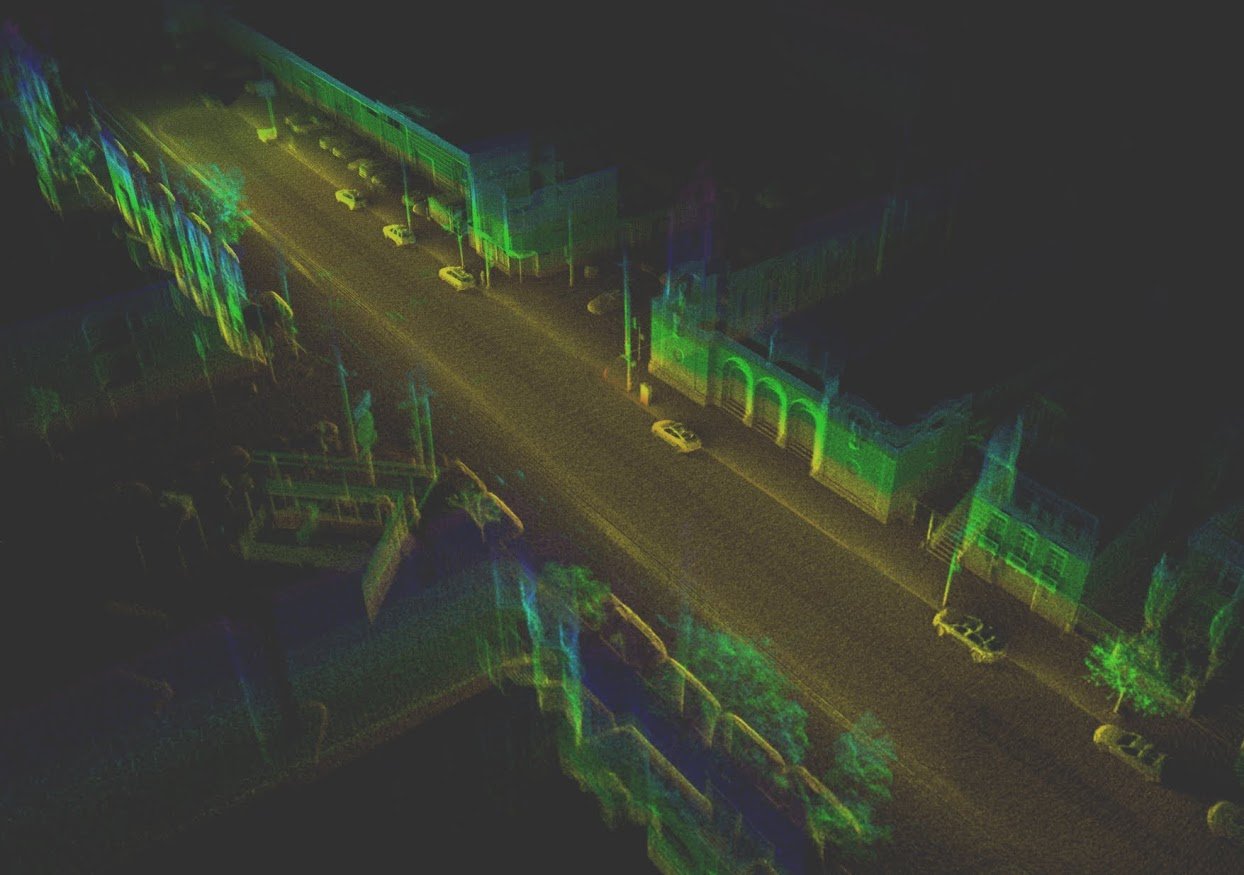
ICET: Real Time LIDAR Odometry and Mapping
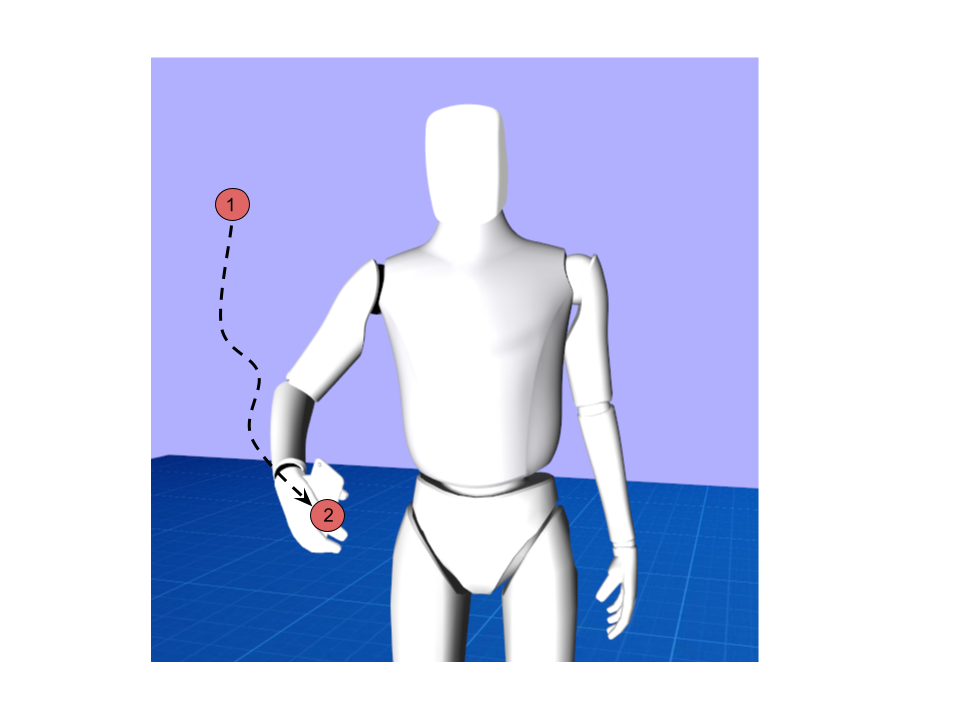
Trajectory Based Human Pose Estimation Using Convolutional Neural Network
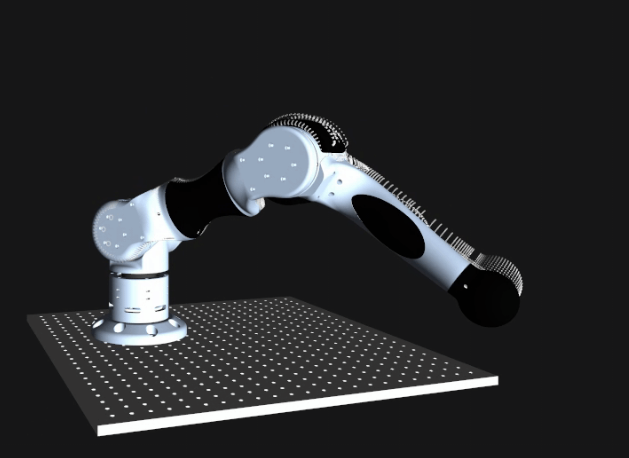
Robotic Arm Control with Deep Reinforcement Learning
Reinforcement Learning based motion control of my latest Cobot design

Gravity, Friction, and Inertia Cancellation of Backdrivable Robotic Arm

Design and Fabrication of 6DOF Cobot

Jumbomask
Open Source Autoclavable n95 Mask Body

Precision Manufacturing/ Fabrication

Deep RL Bipedal “Walker”
